V prvním díle nového seriálů o digitálních snímačích jsme si nastínili základní rozdělení. Dnes si přiblížíme jejich nejdůležitější parametry. Takže: Co je to vlastně digitální snímač, jaké má vlastnosti a jak pracuje?
Snímač je srdcem digitálního fotoaparátu a jeho kvalita je jedním ze základních stavebních kamenů kvalitní fotografie. Jde o ryze analogové zařízení – s miliony světlocitlivých buněk, které měří množství světla (jasu). Každá obrazová buňka „sbírá“ jednotlivé světelné částice (fotony), výsledek poté zesiluje a vše „odesílá“ ve formě elektrického náboje do tzv: A/D převodníku. Ten získaná data převede na binární kód (soustavu jedniček a nul) a buďto rovnou vše ukládá na kartu (v případě RAW formátu) a nebo předává k dalšímu zpracování obrazovému procesoru (JPG nebo TIFF formát). Snímač jako takový zaznamenává pouze jas (stupně šedi), barvu snímač rozlišit nedokáže.
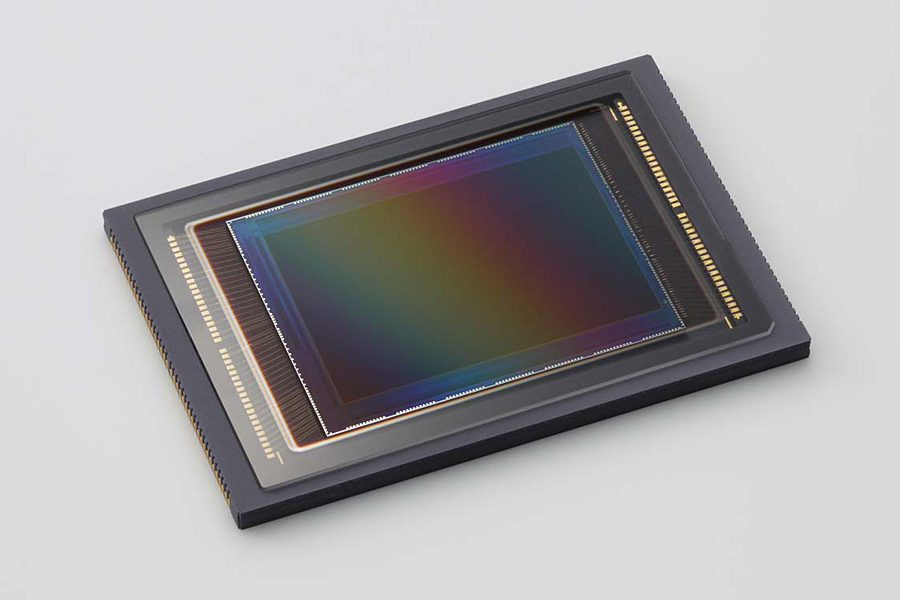
Canon CMOS digitální senzor – relativně velká plocha záznamu obrazových dat
(v porovnání s malými snímači kompaktních fotoaparátů a fotomobilů rozhodně)
Rozlišení senzoru
Základní parametr každého snímače, udávající množství obrazových bodů, které je konkrétní snímač schopen zaznamenat. Udává se v megapixelech (miliony bodů – Mpix) a čím větší tato hodnota je, tím více detailů je schopen snímač zaznamenat a uložit. Rozlišení je však počet „jen“ „černobílých“ pixelů, barva pro každý obrazový bod je definována tzv Bayerovou maskou (a následnou interpolací / dopočtem nejbližších sousedních obrazových bodů). V technických parametrech je často uváděn celkový počet pixelů senzoru vs efektivní počet pixelů! Zatímco celkový počet pixelů zahrnuje všechny body – vč. těch okrajových „mrtvých bodů“ (sloužících především k různým opravným procesům fotoaparátu), pro nás relevantními jsou vždy jen pixely efektivní).

Systém digitálních SLR je velice důmyslné a zároveň až geniálně jednoduché řešení.
Ostatně princip fungování moderních digitálních zrcadlovek zůstal v podstatě totožný
jako ten z éry klasického kinofilmu – pouze 35mm kinofilm nahradila elektronika (digitální snímač).
(průřez DSLR Nikon)
Pixelů není nikdy dost
Počet megapixelů „Mpix“ (rozlišení) se stal bohužel standardním obchodním tahákem, na který spousta laiků slyší (pixel = “picture element” – zkratka, prvek obrazu. ). Ale je nám vůbec k něčemu ultra-vysoké-rozlišení? Zatímco před cca deseti lety byl trhák 2 Mpix fotoaparát, dnes mají běžně i ty nejzákladnější kompakty 12 Mpix. Extrémní rozlišení snímačů jsou vynikající pro produkci fyzicky velkých obrazů (například pro velkoformátový tisk), také díky nim můžeme z našich snímků dělat velké výřezy nebo lze snímky výrazně upravovat (v kombinaci s rozumným SW a obrazovým formátem – nejlépe RAW). Na druhou stranu však ruku v ruce se zvyšujícím se rozlišením stoupají logicky též nároky na zpracování dat (obrazové procesory a buffer / operační paměť fotoaparátů) a datová úložiště (paměťové karty, HDD). V neposlední řadě též nastupují na scénu čím dál více i problémy s klasickými neduhy typu obrazového (digitálního) šumu nebo bloomingu („přetečení“ náboje do sousedních poxelů).

Digitální technika má obecně problém s výrazně temnými scénami (viz noční fotografie).
Jednak zde zcela selhává jak automatické expoziční měření, tak i automatické ostření…
a problém digitálního šumu (vysoké ISO, dlouhé expoziční časy) zde začíná být aktuální
Specifikace pixelů
Čím větší je obrazový bod (pixel), tím větší je jeho citlivost na světlo a zároveň i menší šum. Velikost přímo souvisí s rozlišením a celkovou plochou snímače. Čím vyšší je rozlišení senzoru při stejné ploše snímače, tím menší logicky musí být každý pixel. A to je jeden z klíčových problémů současného stavu digitální techniky! Zatímco rozlišení výrobci neustále zvětšují, velikost snímačů zůstává v podstatě stejná. Tím se zmenšují jednotlivé pixely – ovšem na úkor samotné kvality snímků. Kompaktní fotoaparáty mají dnes pixely o velikosti asi 2µm (a menší), DSLR disponují podstatně většími jednotlivými obrazovými body (mají také výrazně větší plochu snímače). Větší plocha pixelů generuje nižší obrazový šum, čímž lze používat podstatně vyšší ISO hodnoty při stejném výsledném šumu. Také v případě dynamického rozsahu (zjednodušeně: množství zaznamenatelných jasů) jsou na tom větší snímače výrazně lépe. Opačným extrémem jsou pak mobilní telefony, kde velikost jednotlivých pixelů dosahuje sotva 1µm, výsledné snímky pak trpí výrazným šumem, bloomingem, malou dynamikou jasů, menším prokreslením detailů a celkovým poklesem brilance obrazu.

Digitální snímače jsou sofistikované a skvěle fungující zařízení. Bohužel v určitých situacích
narážíme na jejich limity – např. fotografujeme-li světelně vysoce kontrastní scény
(viz. západy, východy slunce). Snímač tak neumí zaznamenat celou jasovou škálu.
V případě JPG (8-bit zpracování) též nastupují problémy komprimace (“zhuštění dat”),
– barevné přechody v určitých oblastech vytváří nepěkné “skoky” (viz sluneční paprsky)
Dynamický rozsah
Když už jsme naťukli onen „dynamický rozsah“, co to vlastně je? Udává nám rozsah jasů (od nejsvětlejšího bodu po nejtmavší, neboli „od jasně bílé po zcela černou“), který je snímač schopen lineárně zaznamenat. Dnes používané 12bitové převodníky (některé fotoaparáty umí i 14-bitů) mají rozsah hodnot 0 až 4095 – umí tedy zaznamenat 4096 odstínů šedé, kde 0 odpovídá 0V (napětí na snímači = totální černá) a hodnota 4096 = absolutní bílá (maximální možné napětí). Uvedené 12-bitové převodníky jsou však (až na výjimky) záležitostí výhradně digitálních zrcadlovek, potažmo záznamu do RAW (popř. TIFF) formátů. Běžné kompaktní fotoaparáty a běžný obrazový formát JPG – umí pracovat pouze s 8-bitovým zpracováním obrazu (1 kanál / z R-G-B), množství zaznamenatelných jasů je v případě JPGu tedy pouze 256! Zatímco běžný, komprimovaný JPG (8-bitové zpracování) umí zaznamenat cca 16,777 miliónů barev, bezeztrátový TIFF (získaný z RAWu) umí zobrazit až cca 68 miliard barev!! „Nač tolik barev?!“, možná někdo namítne… Ano, oněch cca 16,8 miliónů barev (JPG) většinou stačí ale jsou situace, kdy je určitý gradient (barevný přechod) natolik jemný, že v některé oblasti prostě barvy „dojdou“ a přechod pak není plynulý ale skokový (jev, který se nazývá „posterizace“). Setkat se s daným jevem můžeme například u jasně modré oblohy nebo prostupujících slunečních paprsků, popř u černobílé fotografie s bohatou škálou odstínů šedé.
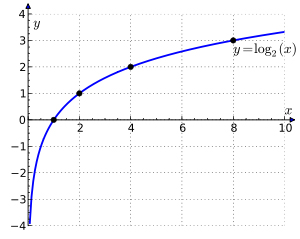
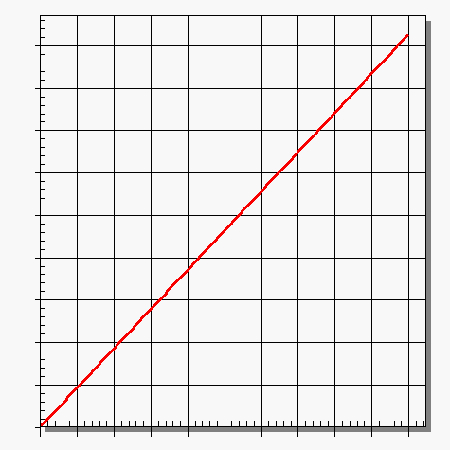
Lineární průběh záznamu digitálních technogií (obr. níže) VS logaritmický průběh (obr. výše)
– blízký též lidskému vnímání světa (lineární křivka záznamu digitálních fotoaparátů,
je stejně ještě dodatečně upravena – “zkroucena”, aby se přiblížila našemu oku)
Závěrem
Hlavním problémem současných snímačů je stále relativně velký obrazový šum (i když situace se neustále zlepšuje) a dále nízký dynamický rozsah. Kinofilm takové problémy neměl. Sice produkoval „zrno“ (což bychom s trochou nadsázky mohli brát jako ekvivalent k obrazovému / digitálnímu šumu), nicméně zrno působilo „teplým“ a nerušivým dojmem (ostatně softwarové přidávání umělého „zrna“ je dnes – v digitální fotografii běžnou praxí). Dynamický rozsah byl v klasické fotografii také jinde. Zatímco digitální záznam je striktně lineární (kolmá, rovná přímka), dynamický průběh kinofilmu je logaritmický, což odpovídá i lidskému zraku (naše oko funguje v podstatě také „logaritmicky“, nikoli lineárně). V digitální fotografii tedy zatím stále bojujeme (a určitě ještě nějakou dobu budeme) jak s problémem vysokých ISO hodnot (a následnou redukcí nehezkého obrazového šumu), tak se silně kontrastními scénami – kde současné snímače zkrátka nejsou schopni zaznamenat celý světelný (jasový) rozsah scény. Mnoho z toho řeší pokročilé softwary (jejichž algoritmy jsou čím dál lepší) a praktické funkce typu HDR – které výrobci a programátoři neustále zdokonalují. Nicméně fotograf s digitálem i přesto běžně řeší klasické dilema, „co ve scéně obětuji?“ – tmavá místa nebo místa světlá? Klíčem je perfektní exponování snímku a maximální využití dostupných možností, které digitální fotografie nabízí – RAW formát, kvalitní SW foto-editory a důsledně (citlivé) úpravy fotografií v PC.
Martin Hájek










{kind=link}
Soutěžím u vás o praktickou čistící sadu 3v1